WeedMap: Large-scale Multispectral Weed Mapping Dataset
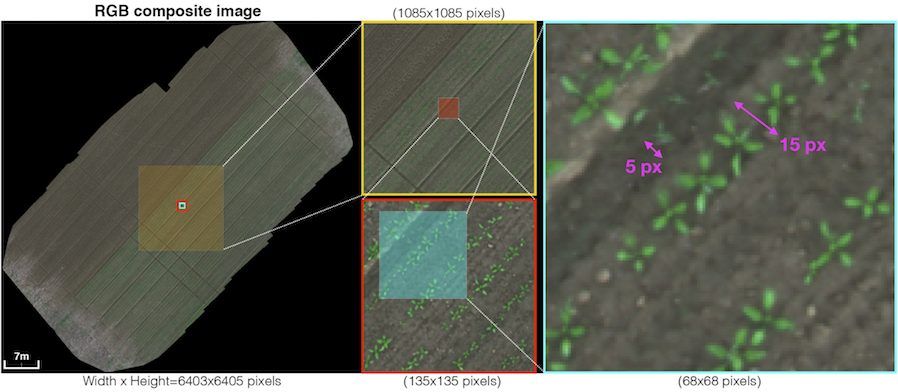
Multispectral UAV dataset over sugar beet fields in Eschikon (Switzerland) and Rheinbach (Germany) with orthomosaic maps and tiled crops for weed/crop segmentation. Captured with MicaSense RedEdge-M and Sequoia cameras.
Highlights
- 8 datasets (indices 000–007), 18,746 images across 129 directories (~5.36 GB)
- Orthomosaics and tiles with RGB/CIR/NDVI composites, masks, and pixel-level labels
- Ground truth: background/crop/weed (color and indexed label maps)
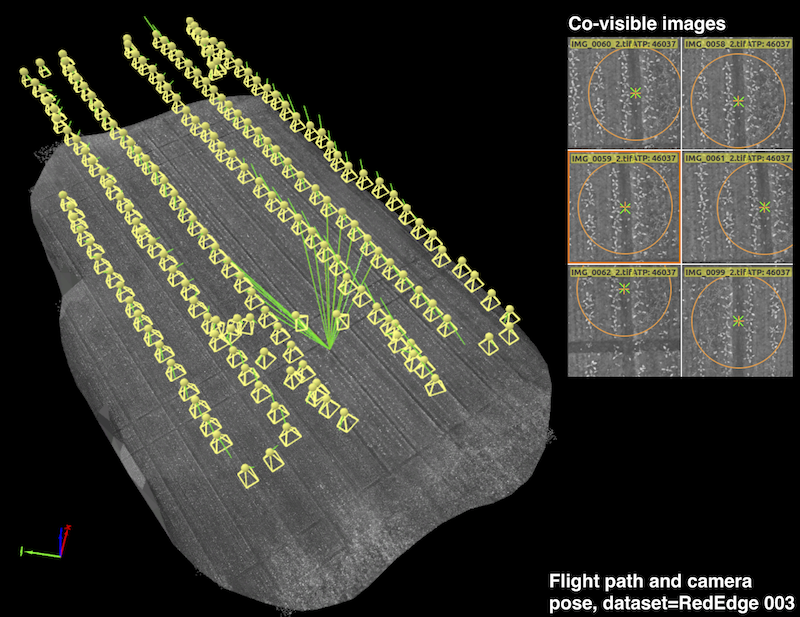
- Flight paths provide ~1 cm GSD; includes interactive viewers for orthomosaics
- Camera specs and folder structure docs included; MATLAB scripts for tile/orthomosaic conversion
Folder Structure
Orthomosaic/RedEdgeandOrthomosaic/Sequoia: composite PNG, groundtruth labels, reflectance TIFFsTiles/RedEdgeandTiles/Sequoia: per-channel tiles, masks, and groundtruth labels- Naming:
XXX_frameYYYY_GroundTruth_color.png/..._iMap.png, masksframeYYYY, tiles per channel
Downloads
- Full dataset (5.36 GB): https://doi.org/10.3929/ethz-c-000788571
- Orthomosaics:
- RedEdge bundle (1.9 GB): https://doi.org/10.3929/ethz-c-000788571
- Sequoia bundle (1.49 GB): https://doi.org/10.3929/ethz-c-000788571
- Per-dataset archives 000–007 available (links to be updated)
- Tiles:
- RedEdge bundle (637 MB): https://doi.org/10.3929/ethz-c-000788571
- Sequoia bundle (444 MB): https://doi.org/10.3929/ethz-c-000788571
- Per-dataset archives 000–007 available (links to be updated)
Citation
I. Sa, M. Popovic, R. Khanna, Z. Chen, P. Lottes, F. Liebisch, J. Nieto, C. Stachniss, A. Walter, R. Siegwart,
“WeedMap: A large-scale semantic weed mapping framework using aerial multispectral imaging and deep neural network for precision farming”, Remote Sensing, 2018. DOI: 10.3390/rs10091423.
Tags: agriculture, multispectral, semantic-segmentation, orthomosaic, uav