Incremental Object Database: Multi-instance Completion Datasets
RGB-D and pose data for building an incremental object database and completing 3D models from multiple partial observations. Captured with a Google Tango Lenovo Phab 2 Pro; includes optimized loop-closed poses.
Dataset Description
- Raw sensor data plus Tango-generated poses
- Example (three_chairs_teaser_20180301_040531.bag): 2:12 duration, 4.9 GB; topics include RGB, depth, fisheye, IMU, and transforms
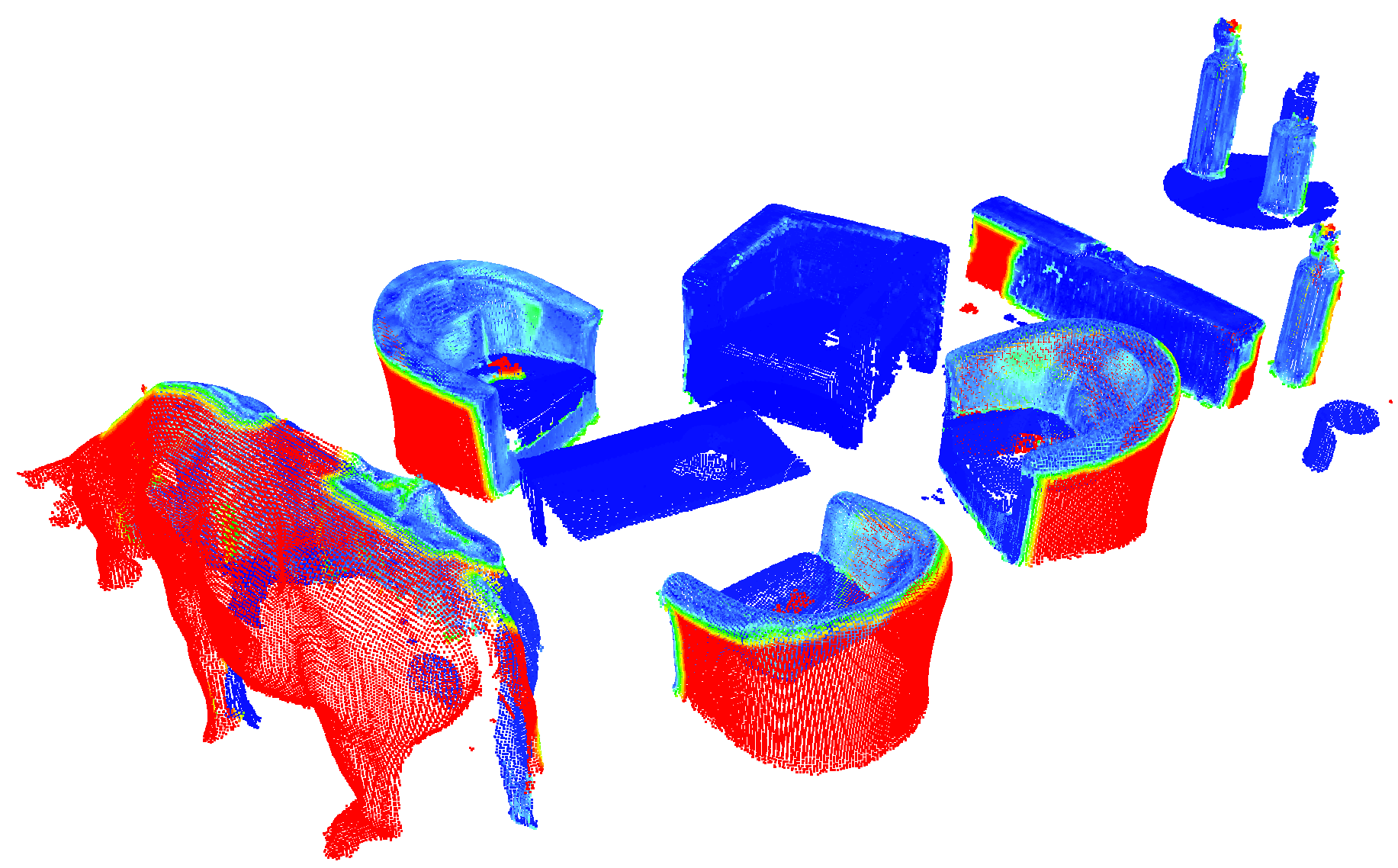
- Multiple object-rich scenes with repeated instances to enable matching and completion; red regions in visualization indicate filled unseen parts
Downloads
asl_cow_20180224_161851.bag— 10 GB: https://doi.org/10.3929/ethz-c-000788567asl_cow_20180224_162434.bag— 11 GB: https://doi.org/10.3929/ethz-c-000788567asl_cow_20180224_163303.bag— 16 GB: https://doi.org/10.3929/ethz-c-000788567three_chairs_teaser_20180301_040531.bag— 5 GB: https://doi.org/10.3929/ethz-c-000788567
Citation
IROS 2018,
“Incremental Object Database: Building 3D Models from Multiple Partial Observations”. (See paper for author list.)
Tags: rgbd, object-database, reconstruction, indoor