EuRoC MAV Dataset

This page presents visual-inertial datasets collected on-board a micro aerial vehicle (MAV). The datasets contain stereo images, synchronized IMU measurements, and accurate motion and structure ground-truth.
Publication
M. Burri, J. Nikolic, P. Gohl, T. Schneider, J. Rehder, S. Omari, M. Achtelik, R. Siegwart, The EuRoC micro aerial vehicle datasets, International Journal of Robotic Research, 2016. Publisher link
BibTeX Citation
@article{Burri25012016,
author = {Burri, Michael and Nikolic, Janosch and Gohl, Pascal and Schneider, Thomas and Rehder, Joern and Omari, Sammy and Achtelik, Markus W and Siegwart, Roland},
title = {The EuRoC micro aerial vehicle datasets},
year = {2016},
doi = {10.1177/0278364915620033},
URL = {http://ijr.sagepub.com/content/early/2016/01/21/0278364915620033.abstract},
eprint = {http://ijr.sagepub.com/content/early/2016/01/21/0278364915620033.full.pdf+html},
journal = {The International Journal of Robotics Research}
}
Downloads
All dataset files are now hosted on the ETH Research Collection.
- Dataset landing page: ETH Research Collection
Available Data
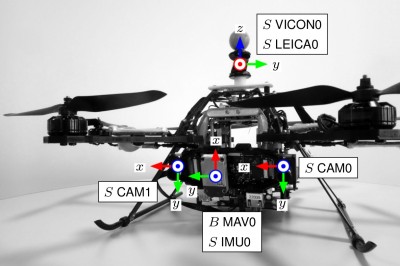
- Visual-inertial sensor unit
- Stereo images (WVGA monochrome, 2×20 FPS)
- MEMS IMU (angular rate and acceleration, 200 Hz)
- Shutter-centric temporal alignment
- Ground-truth
- Vicon motion capture system (6D pose)
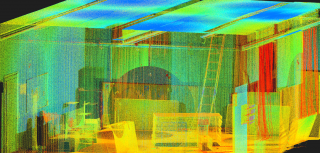
- Leica MS50 laser tracker (3D position)
- Leica MS50 3D structure scan
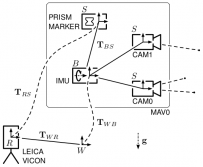
- Calibration
- Camera intrinsics
- Camera–IMU extrinsics
- Spatio-temporally aligned ground truth
Tools
- Dataset parser: dataset_tools
Known issues
- The visual-inertial sensor uses automatic exposure control independently per camera, leading to varying brightness between the stereo pair.
- Some datasets exhibit very dynamic motions that can deteriorate laser tracker accuracy.
- Synchronization between sensor data and motion ground truth is limited by separate recording systems and missing device timestamps for Vicon; see the paper for details.
Tags: visual-inertial, MAV, SLAM